Soluzioni di Automazione

Riduzione dei costi per pezzo

Aumento della produttività

Adattabile a qualsiasi spazio al suolo

Riduzione dei tempi ciclo

Funzionamento semplice

Utilizzo su turni non presidiati
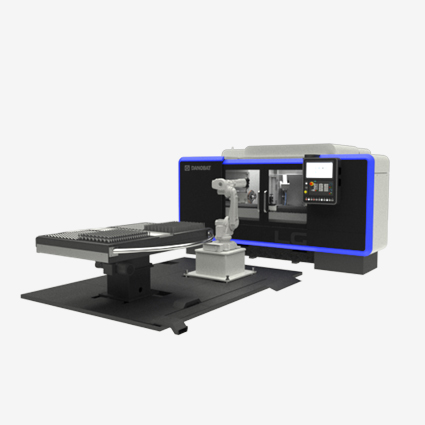
Robot

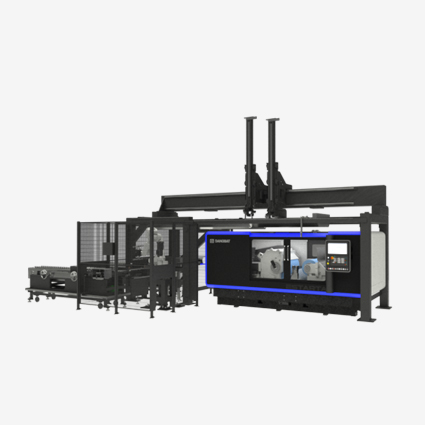
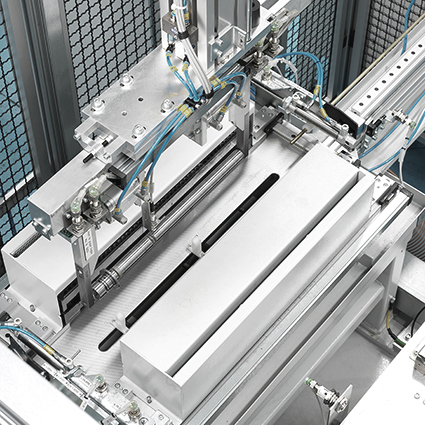
Portale


Soluzioni ibride

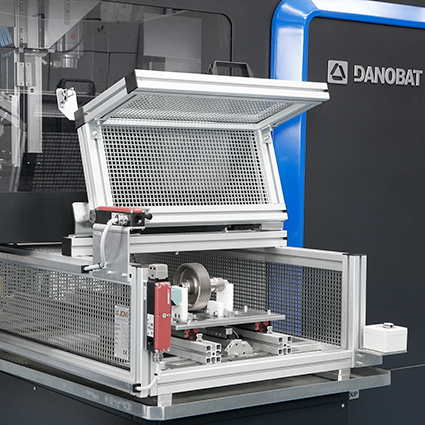
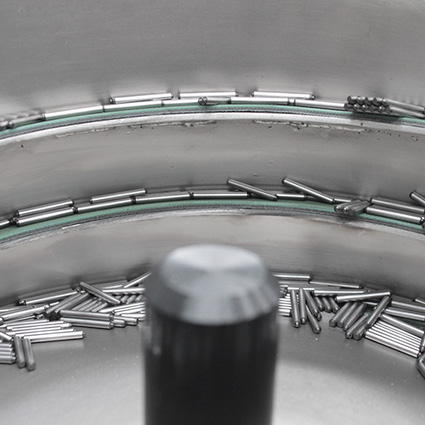
Rettifica senza centri — In passata


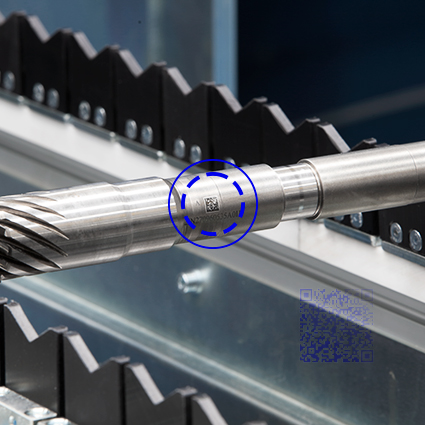
Il pezzo da lavorare viene identificato, controllato il suo codice di riferimento o contrassegnato secondo le esigenze del cliente (laser, micro-percussione, ecc.).
I pezzi vengono puliti e asciugati utilizzando aria compressa, forza centrifuga o un sistema di aspirazione.

I pezzi scarto vengono separati e possono essere prelevati da un operatore.

- Doppia tavola rotante pallettizzata
- Tavola rotante o lineare a bassa velocità
- Caricamento manuale dei pallet



Dopo la lavorazione, il pezzo viene sottoposto a un’operazione di superfinitura utilizzando un nastro abrasivo o una pietra di superfinitura.
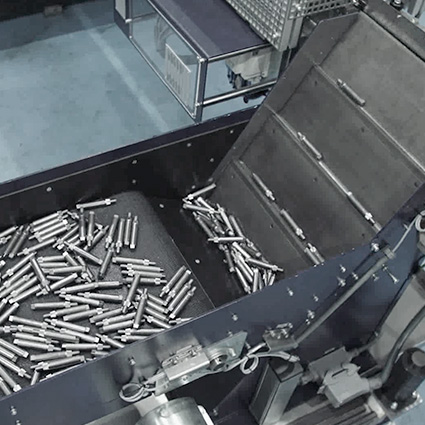
L'operatore riempie il primo cassetto o cestello con i pezzi da lavorare, la vasca di raccolta con l'elevatore li separa e accumula, di solito su un nastro trasportatore.
I pezzi lavorati vengono controllati in modo casuale o dopo un determinato quantitativo.

- Trasportatori passo-passo con supporti a V
- Trasportatori a catena
- Caricatore semiautomatico
- Trasportatori passo-passo a nastro con distanziali
- Trasportatori a nastro piatto a frizione
- Trasportatori di pallet a ricircolo di pallet
- Trasportatori ad aste verticali ad anello chiuso
Il pezzo viene orientato o allineato per una corretta finitura.
La vibrazione alimenta un gran numero di pezzi che devono essere caricati in macchina. Questo alimentatore è normalmente destinato a pezzi di piccole dimensioni.

Alle parti lavorate viene applicato un rivestimento protettivo per prevenire l'ossidazione e migliorare l’aspetto visivo.

Sistema di alimentazione dei pallet, con o senza carrello, caricati manualmente nella cella.
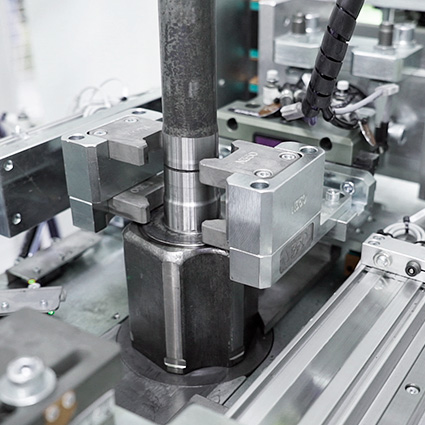
Il pezzo viene misurato prima e/o dopo la lavorazione.
Trasporta i pezzi all’interno della macchina tramite tubazioni e sistemi a depressione. Adatto a pezzi leggeri e di piccole dimensioni.

Un robot dotato di telecamera e visione artificiale svuota un contenitore con pezzi disposti in modo casuale. Il robot può caricare e scaricare direttamente in macchina o alimentare un altro sistema di carico.