Wir liefern Automation

Reduzierung der Kosten pro Teil

Erhöhung der Produktivität

Anpassungsfähig an jede Aufstellfläche

Verkürzung von Zykluszeiten

Einfache Bedienung

Realisierung von mannlosen Schichten
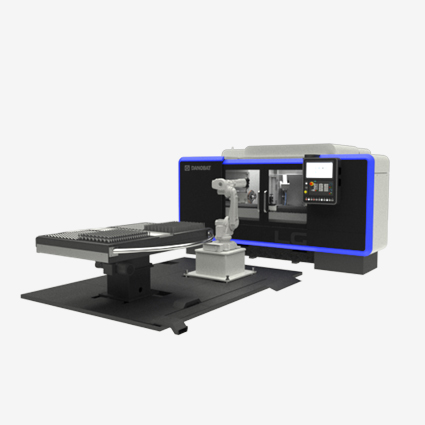
Roboter

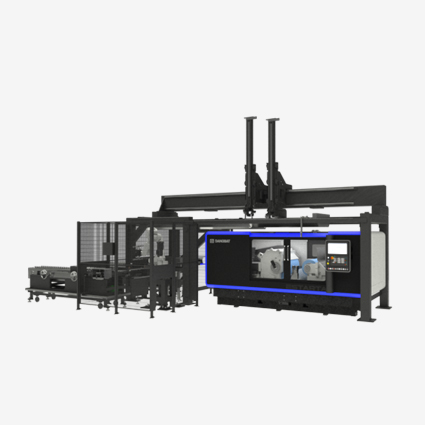
Portal


Hybrid

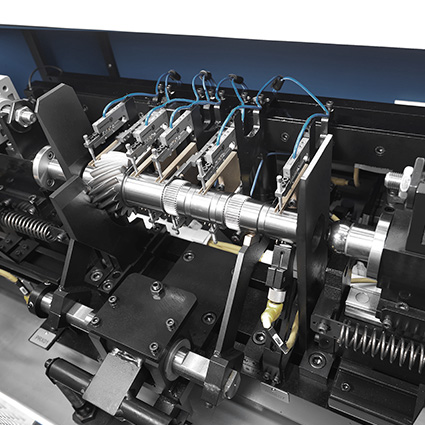
Spitzenlos Schleifen — Durchlauf



Palettenzuführsystem, mit oder ohne Laufwagen.


Das Teil wird vor und /oder nach der Bearbeitung gemessen.
Er befördert die Teile Druckluftunterstützt von außen in den Innenraum der Maschine. Geeignet für leichte und kleine Teile.

Ein Roboter mit Kamarasystem entleert einen Behälter mit beliebig angeordneten Teilen. Der Roboter kann direkt in die Maschine be- und entladen oder ein anderes Beladesystem beschicken.
Das zu bearbeitende Teil wird identifiziert, sein Referenzcode wird überprüft oder es wird nach Kundenwunsch markiert (Laser, Mikroperkussion, usw.).
Die Teile werden gereinigt mittels Druckluft, zentrifugal oder durch ein Vakuumsystem.

NIO-Teile werden ausgeschleust und können von einem Bediener entnommen werden.

- Drehtisch mit 2 Paletten
- Langsam laufender Drehtisch
- Manuelle Paletten-Beladung

Nach der Bearbeitung wird das Teil zur Superfinish-Operation mit einem Finishband oder Stein gefördert.
Der Bediener bestückt den Bunker oder den Korb mit den zu bearbeitenden Teilen, der Plattenförderer trennt und sammelt diese Teile, in der Regel auf einem Förderband.
Die bearbeiteten Teile werden entweder stichprobenweise oder nach einer bestimmten Anzahl von Teilen kontrolliert.

- Taktbänder
- Kettenförderer
- Halbautomatische Schubladensysteme
- Flachbandförderer
- Palettenumlaufbänder
- Plattenförderer
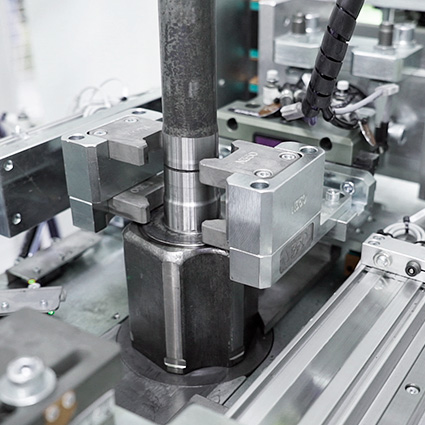
Das Teil wird für eine korrekte Nachbearbeitung positioniert oder ausgerichtet.
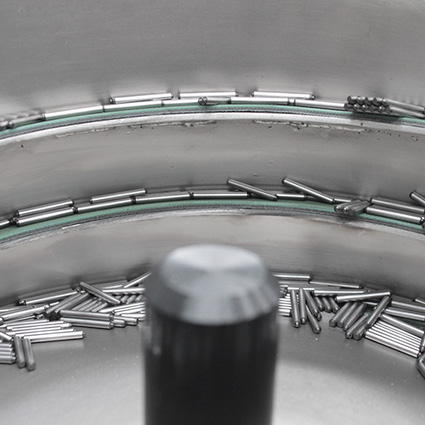
Die Vibrationszuführung fördert eine große Anzahl von Teilen, die in die Maschine geladen werden. Dieser Förderer ist für Kleinteile geeignet.

Auf die bereits bearbeiteten Teile wird eine Schutzschicht aufgetragen, um die Oxidation zu verhindern.